





|
|
|||||||||||||||
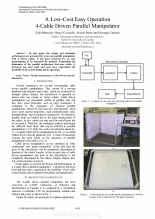
A Low-Cost Easy-Operation 4-Cable Driven Parallel Manipulator |
|||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
|
||||||||||||||
| Sammlungen | |||||||||||||||
|
|||||||||||||||
| Permanentlinks | |||||||||||||||
|
|
|||||||||||||||
| Datenbereitsteller | |||||||||||||||
|
|
|||||||||||||||
| Verwaltungsinformationen | |||||||||||||||
|
|||||||||||||||