





|
|
|||||||||||||
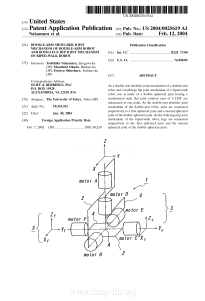
Double-Arm shoulder joint mechanism of double-arm Robot and both-legs hip joint mechanism of Biped-Walk Robot |
|||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
|
||||||||||||
| Collections | |||||||||||||
|
|||||||||||||
| Permanent links | |||||||||||||
|
|
|||||||||||||
| Data provider | |||||||||||||
|
|
|||||||||||||
| Administrative information | |||||||||||||
|
|||||||||||||