| |

|
Investigation on the stiffness of 3-HSS parallel kinematic machine using finite element analysis, in: Transactions of the Canadian Society for Mechanical Engineering, CSME
Auteur: Kerle, Hanfried; Zhou, Lihua; Huang, Tian
Publié: 2002
|
|
|
Stiffness analysis of the main module for parallel machine tools by finite element analysis, in: Transactions of Tianjin University
Auteur: Modler, Karl-Heinz; Huang, Tian; Zhou, Lihua; Wang, Yu-ru
Publié: 2001
|
|
|
Proceedings // The Eleventh World Congress in Mechanism and Machine Science ; Tianjin, China, April 1 - 4, 2004
Auteur: Huang, Tian (Ed.); Ceccarelli, Marco; Koetsier, Teun; Corves, Burkhard; Stolle, Georg; Hüsing, Mathias; Kerle, Hanfried; Hesselbach, Jürgen; Krefft, Mathias; Plitea, Nicolae; Modler, Karl-Heinz; Lin, Song
Publié: 2004
|
|
|
Application of Graph theory to kinematic and force analysis of special kinematic chains, in: Proceedings // Ninth World Congress on the Theory of Machines and Mechanisms, Politecnico di Milano, Italy, August 29/September 2, 1995, Mechanisms and transmissions
Auteur: Huang, Tian; Zeng, Z.P.
Publié: 1995
|

|
Proceedings // The Eleventh World Congress in Mechanism and Machine Science: Volume 2
Auteur: Huang, Tian (Ed.); Koetsier, Teun; Corves, Burkhard
Publié: 2004
|
|
|
Proceedings // The Eleventh World Congress in Mechanism and Machine Science: Volume 3
Auteur: Huang, Tian (Ed.); Corves, Burkhard; Stolle, Georg; Hüsing, Mathias; Kerle, Hanfried; Hesselbach, Jürgen; Krefft, Mathias; Plitea, Nicolae; Modler, Karl-Heinz; Lin, Song
Publié: 2004
|
|
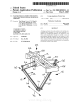
Planar parallel robot mechanism with two translational degrees of freedom
Auteur: Huang, Tian; Li, Meng; Li, Zhanxian; Chetwynd, Derek G.; Whitehouse, David J.
Publié: 2005
|

|
Planar parallel robot mechanism with two translational degrees of freedom
Auteur: Huang, Tian; Li, Meng; Li, Zhanxian; Chetwynd, Derek G.; Whitehouse, David J.
Publié: 2006
|

|
Proceedings of Twelfth World Congress in Mechanism and Machine Science: Semi-Analytical Approach for Stiffness Estimation of PKM having Complex Machine Frames.
Auteur: Wang, Yuxin; Huang, Tian; Chetwynd, Derek G.
Publié: 2007
|

|
Proceedings of Twelfth World Congress in Mechanism and Machine Science: Inverse Dynamics of 3-RPS Parallel Mechanism Based on Virtual Work Principle.
Auteur: Song, Yimin; Li, Yonggang; Huang, Tian
Publié: 2007
|

|
An Approach for Stiffness Modelling of Lower Mobility Parallel Manipulators using the Generalized Jacobian, in: Final program // Thirteenth World Congress in Mechanism and Machine Science, Robotics and Mechatronics
Auteur: Chetwynd, Derek G.; Huang, Tian; Li, Yonggang; Liu, Haitao
Publié: 2011
|
|
Proceedings of the 14th IFToMM World Congress, Robotics and Mechatronics: Force/Motion/Stiffness Transmissibility Analyses of Redundantly Actuated and Overconstrained Parallel Manipulators
Auteur: Liu, Haitao; Huang, Tian; Kecskeméthy, Andrés; Chetwynd, Derek G.
Publié: 2015
|
|





