





|
|
|||||||||||||||
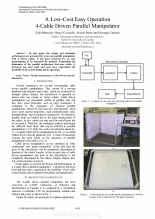
A Low-Cost Easy-Operation 4-Cable Driven Parallel Manipulator |
|||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
|
||||||||||||||
| Collections | |||||||||||||||
|
|||||||||||||||
| Permanent links | |||||||||||||||
|
|
|||||||||||||||
| Data provider | |||||||||||||||
|
|
|||||||||||||||
| Administrative information | |||||||||||||||
|
|||||||||||||||