Full-text is not available at the moment
|
Informations générales |
| Auteur |
IFToMM - International Federation for the Promotion of Mechanism and Machine Science; Kim, Kun-Woo; Lee, Jae-Wook; Kim, Hyung-Ryul; Jang, Jin-Seok; Yoo, Wan-Suk; Ma, Jia; Qian, Linfang; Chen, Guangsong; Dong, Shuai; Askari, E.; Flores, Paulo; Dabirrahmani, D.; Appleyard, Richard; Mărgineanu, Dan; Lovasz, Erwin-Christian; Ciupe, Valentin; Gruescu, Corina; Modler, Karl-Heinz; Zhao, Dong-Jie; Liu, Xiang; Zhao, Jing-Shan; Wang, Li-Ping; Chieng, Wei-Hua; Caron, Stéphane; Nakamura, Yoshihiko; Cedillo, Tomas; Flores-Luna, Rosa Itzel; Ramirez-Diaz, E. I.; Kövecses, Jozsef; Kovacs, László L.; Fontes, João Vitor de Carvalho; Venter, G. S.; Silva, M.M. da; Jomartov, Assylbek; Joldasbekov, Scanderbek; Wang, Sanmin; Sun, Yuantao; Zhi, Changjian; Tong, Martin; Majewski, Tadeusz; Ahmat, Mutellip; Li, Ning; Huo, Zhongtang; Chadaj, Krzysztof; Malczyk, Paweł; Fraczek, Janusz |
| Publié |
Taipei, Taiwan, 2015
|
| Edition |
|
| Extension |
|
| ISBN |
|
|
| |

|
Proceedings of the 14th IFToMM World Congress ; October 25-30, 2015, Taipei Taiwan
Auteur: IFToMM - International Federation for the Promotion of Mechanism and Machine Science; Hsu, Chih-Hung; Liang, Francois; Guo, Lin; Chen, Jianwen; Li, Lifeng; Tao, Chunjing; Yan, Heping; Hsieh, Chiu-Fan; Lin, Wen-Huang; Chen, Jia-Sian; Zhu, You-Qing; Liu, Ching-Sheng; Ferreira, R.; Leal, A.; Silva, F.; Flores, Paulo; Espregueira-Mendes, João; Lee, Meng-Shiue; Hsu, Pei-Jung; Sun, Asher; Wong, [...]
Publié: 2015
|
|
| |

|
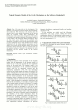
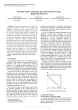
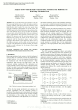
Proceedings of the 14th IFToMM World Congress, Multibody Dynamics: Tensile Force Applied to Shear Pin and Unwinding Motion of Flexible Hose
Auteur: Kim, Kun-Woo; Lee, Jae-Wook; Kim, Hyung-Ryul; Jang, Jin-Seok; Yoo, Wan-Suk
Publié: 2015
|
|
Proceedings of the 14th IFToMM World Congress, Multibody Dynamics: Unscented Kalman Filter for Parameter Estimation of the Lankarani-Nikravesh Contact Force Model
Auteur: Ma, Jia; Qian, Linfang; Chen, Guangsong; Dong, Shuai
Publié: 2015
|
|
Proceedings of the 14th IFToMM World Congress, Multibody Dynamics: Dynamic Modeling and Analysis of Wear in Artificial Hip Articulations
Auteur: Askari, E.; Flores, Paulo; Dabirrahmani, D.; Appleyard, Richard
Publié: 2015
|
|
Proceedings of the 14th IFToMM World Congress, Multibody Dynamics: Tetrahedral Mechanism Crawling on a Slope
Auteur: Mărgineanu, Dan; Lovasz, Erwin-Christian; Ciupe, Valentin; Gruescu, Corina; Modler, Karl-Heinz
Publié: 2015
|

|
Proceedings of the 14th IFToMM World Congress, Multibody Dynamics: Inverse Kinematics and Dynamics of a Spraying Robot
Auteur: Zhao, Dong-Jie; Liu, Xiang; Zhao, Jing-Shan; Wang, Li-Ping
Publié: 2015
|
|
Proceedings of the 14th IFToMM World Congress, Multibody Dynamics: Mutual Energy of Relative Motions
Auteur: Chieng, Wei-Hua
Publié: 2015
|
|
Proceedings of the 14th IFToMM World Congress, Multibody Dynamics: Planning with the Center-of-Mass Rather than Stances for Humanoids Walking on Uneven Terrains
Auteur: Caron, Stéphane; Nakamura, Yoshihiko
Publié: 2015
|
|
Proceedings of the 14th IFToMM World Congress, Multibody Dynamics: FEM Dynamic Analysis of a Compliant Mechanism
Auteur: Cedillo, Tomas; Flores-Luna, Rosa Itzel; Ramirez-Diaz, E. I.
Publié: 2015
|
|
Proceedings of the 14th IFToMM World Congress, Multibody Dynamics: Effective Stiffness: Static Performance of Mechanical Systems
Auteur: Kövecses, Jozsef; Kovacs, László L.
Publié: 2015
|
|
Proceedings of the 14th IFToMM World Congress, Multibody Dynamics: Assessing the Actuation Redundancy Trade-off Effects on the Dynamic Performance of Planar Parallel Kinematic Machines
Auteur: Fontes, João Vitor de Carvalho; Venter, G. S.; Silva, M.M. da
Publié: 2015
|
|
Proceedings of the 14th IFToMM World Congress, Multibody Dynamics: Typical Dynamic Models of the Cyclic Mechanism on the Software SimulationX
Auteur: Jomartov, Assylbek; Joldasbekov, Scanderbek
Publié: 2015
|
|
Proceedings of the 14th IFToMM World Congress, Multibody Dynamics: Dynamic Study on Revolute Joint with Clearance of the Deployable Structure
Auteur: Wang, Sanmin; Sun, Yuantao; Zhi, Changjian
Publié: 2015
|
|
Proceedings of the 14th IFToMM World Congress, Multibody Dynamics: Equivalence of Two Order(N) Rate Solutions for Multibody Systems with Hamilton's Equations Based EOM
Auteur: Tong, Martin
Publié: 2015
|

|
Proceedings of the 14th IFToMM World Congress, Multibody Dynamics: Verification of Stability of Synchronous Eliminator of Vibration Applied for Objects in a Series
Auteur: Majewski, Tadeusz
Publié: 2015
|
|
Proceedings of the 14th IFToMM World Congress, Multibody Dynamics: Analysis of Flow Field Dynamic Characteristics of Friction Pair Fluid-Film for Heat Pump Mechanical Seal
Auteur: Ahmat, Mutellip; Li, Ning; Huo, Zhongtang
Publié: 2015
|
|
Proceedings of the 14th IFToMM World Congress, Multibody Dynamics: Hamiltonian Based Parallel Formulation for Open-Loop Multibody System Dynamics
Auteur: Chadaj, Krzysztof; Malczyk, Paweł; Fraczek, Janusz
Publié: 2015
|
|





