| |

|
Effiziente kinematische Verarbeitung von Zusammenbauten in feature-basierten CAD-Systemen, in: Kolloquium Getriebetechnik, 2. Kolloquium Getriebetechnik
Auteur: Kecskeméthy, Andrés; Klein, Stefan; Bathelt, Jens; Collenberg, Fabian; Régnault, Georges
Publié: 1997
|

|
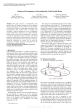
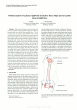
Proceedings of Twelfth World Congress in Mechanism and Machine Science: Workspace Analysis and Maximal Force Calculation of a Face-Shovel Excavator using Kinematical Transformers
Auteur: Flores, Francisco Geu; Kecskeméthy, Andrés; Pöttker, Alois
Publié: 2007
|

|
Advances in multibody systems and mechatronics ; contributions dedicated to Prof. Manfred Hiller on the occasion of his sixtieth birthday ; Duisburg, Germany, September 25, 1999
Auteur: Kecskeméthy, Andrés (Ed.); Modler, Karl-Heinz; Lin, Song; Schiehlen, Werner; Angeles, Jorge; Adamski, Dirk; Bertram, Torsten; Lange, Olav; Ceccarelli, Marco; Morecki, Adam; Husty, Manfred; Kecskeméthy, Andrés; Lange, C.; Lückel, Joachim; Toepper, Stephanie; Jäker, Karl-Peter; Maier, Thomas; Wörnle, Christoph; Duffy, J.; Pfeiffer, Friedrich; Stachel, Hellmuth; Hiller, Manfred; Verhoeven, Richard; [...]
Publié: 1999
|

|
Proceedings of Twelfth World Congress in Mechanism and Machine Science: HexaSpine : A Parallel Platform for Physical Cervical Spine Simulation - Design and Interval-Based Verification.
Auteur: Liem, Kusnadi; Kecskeméthy, Andrés; Merlet, Jean-Pierre
Publié: 2007
|

|
Proceedings of Twelfth World Congress in Mechanism and Machine Science: A Comparison of B-Spline Curves and Pythagorean Hodograph Curves for Multibody Dynamics Simulation.
Auteur: Tändl, Martin; Kecskeméthy, Andrés
Publié: 2007
|

|
Time-Optimal Motion Planning Along Specified Paths for Multibody Systems Including Dry Friction and Power Constraints, in: Final program // Thirteenth World Congress in Mechanism and Machine Science, Multibody dynamics
Auteur: Flores, Francisco Geu; Kecskeméthy, Andrés; Pöttker, Alois
Publié: 2011
|
|
Proceedings of the 14th IFToMM World Congress, Keynotes: Minimal-Coordinate Kinematical Formulations in Multibody Systems and Their Application to Engineering and Biomechanics Problems
Auteur: Kecskeméthy, Andrés
Publié: 2015
|

|
Proceedings of the 14th IFToMM World Congress, Biomechanical Engineering: An Approach to Determine a Human Joint Axis Using Force-Controlled Motion and the Power Iteration Method
Auteur: Kecskeméthy, Andrés; Liu, Haitao; Nguyen, D. H.; Parzer, Herbert; Gattringer, Hubert
Publié: 2015
|
|
Proceedings of the 14th IFToMM World Congress, Robotics and Mechatronics: Force/Motion/Stiffness Transmissibility Analyses of Redundantly Actuated and Overconstrained Parallel Manipulators
Auteur: Liu, Haitao; Huang, Tian; Kecskeméthy, Andrés; Chetwynd, Derek G.
Publié: 2015
|
|
Proceedings of the 14th IFToMM World Congress, Robotics and Mechatronics: Design and Development of a Reconfigurable Cable Parallel Robot
Auteur: Zi, Bin; Qian, Sen; Kecskeméthy, Andrés
Publié: 2015
|

|
Proceedings of the 14th IFToMM World Congress, Computational Kinematics: A Loop-Based Approach for the Detection of Rigid Substructures in Spatial Nucleation-Free Spherical-Spherical Bar Mechanisms
Auteur: Simroth, Florian; Ding, H.; Kecskeméthy, Andrés
Publié: 2015
|
|
Proceedings of the 14th IFToMM World Congress, Computational Kinematics: Position Analysis of a Planar Rigid-Body Tracked by Three Ellipse Pressure Points Along Straight Lines
Auteur: Bufe, Nikolas; Kecskeméthy, Andrés
Publié: 2015
|
|
Proceedings of the 14th IFToMM World Congress, Linkage and Mechanical Controls: Enumeration of the Planar Non-Fractionated Kinematic Chains with Up to Six Basic Loops
Auteur: Ding, Huafeng; Huang, Peng; Kecskeméthy, Andrés
Publié: 2015
|
|





