





|
|
|||||||||||||
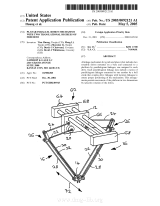
Planar parallel robot mechanism with two translational degrees of freedom |
|||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
|
||||||||||||
| Collections | |||||||||||||
|
|||||||||||||
| Permanent links | |||||||||||||
|
|
|||||||||||||
| Data provider | |||||||||||||
|
|
|||||||||||||
| Administrative information | |||||||||||||
|
|||||||||||||