|
CapaMan2bis Workspace with two legs movement
This video shows the workspace of CapaMan2bis Workspace that can be obtained by moving two legs. Each leg moves within this maximum movable range.
|

|
LARM Hand IV
This video shows the typical operation of LARM Hand IV, a three-fingered hand. Each finger has three phalanges that are driven by a single motor in a modular design. Thus, hands with less or more fingers can be easily built.
|

|
Cassino Hexapod
Photo of Cassino Hexapod. This first prototype has been designed and built at LARM on 2007. It is composed of six legs haveing 3 DC motors each. One of the motors is used for the rotation of a wheel that is placed at the expreemity of the leg.
|

|
Video of Cassino Hexapod
This is a video of Cassino Hexapod. This first prototype has been designed and built at LARM on 2007. It is composed of six legs haveing 3 DC motors each. One of the motors is used for the rotation of a wheel that is placed at the expreemity of the leg for the operation on flat surfaces.
|

|
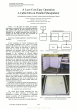
Photo of CaPaMan2 bis
Photo of the prototype named as CaPaMan 2bis (Cassino Parallel Manipulator version 2bis) designed and built at LARM on 2005. This prototype of parallel manipulator has 3 degrees of freedom actuated by 3 DC motors. The movable plate has 6 degrees of mobility.
|
|
|
Video of CaPaMan2bis
Video of the prototype named as CaPaMan 2bis (Cassino Parallel Manipulator version 2bis) designed and built at LARM on 2005. This prototype of parallel manipulator has 3 degrees of freedom actuated by 3 DC motors. The movable plate has 6 degrees of mobility.
|

|
capaman2bis lateral view
Lateral view of the prototype CaPaMan 2bis (Cassino Parallel Manipulator versione 2bis).
|

|
Cassino cam test-bed versione 2006
This photo shows a prototype named as Cassino Cam test-bed version 2006 that has been designed and built at LARM in Cassino. This is a test-bed for planar cams. It is equipped with an encoder on the input shaft. The input shaft is actuated by a DC motor that provides a measurement of the input current and an estimate of the input torque. An accelerometer is istalled on the follower.
|

|
Video of Cassino Cam test-bed version 2006
This video shows a prototype named as Cassino Cam test-bed version 2006 that has been designed and built at LARM in Cassino. This is a test-bed for planar cams. It is equipped with an encoder on the input shaft. The input shaft is actuated by a DC motor that provides a measurement of the input current and an estimate of the input torque. An accelerometer is istalled on the follower.
|

|
Photo of BAPAMAN (Binary Parallel Manipulator)
This photo shows a prototype of a modular binary parallel manipulator named as BAPAMAN . This manipulator has been designed and built within a collaboration of LARM in Cassino with IWF institute in Braunscheig Germany. This manipulator is equipped with shape memory alloy actuators and flexural joints to achieve a good miniaturization and have low-cost easy-operation features..
|
|
|
Video of BAPAMAN (Binary Parallel Manipulator)
This video shows a prototype of a modular binary parallel manipulator named as BAPAMAN . This manipulator has been designed and built within a collaboration of LARM in Cassino with IWF institute in Braunscheig Germany. This manipulator is equipped with shape memory alloy actuators and flexural joints to achieve a good miniaturization and have low-cost easy-operation features..
|

|
Photo of BAPAMAN 2 (Binary Parallel Manipulator version 2)
This photo shows a prototype of a modular binary parallel manipulator named as BAPAMAN . This manipulator has been designed and built within a collaboration of LARM in Cassino with IWF institute in Braunschweig Germany. This manipulator is equipped with shape memory alloy actuators and flexural joints to achieve a good miniaturization and have low-cost easy-operation features.. As compared with BAPAMAN1 this prototype has almost half size and a significant increase in stiffness and accuracy performance.
|

|
Video of BAPAMAN 2 (Binary Parallel Manipulator version 2)
This video shows a prototype of a modular binary parallel manipulator named as BAPAMAN . This manipulator has been designed and built within a collaboration of LARM in Cassino with IWF institute in Braunschweig Germany. This manipulator is equipped with shape memory alloy actuators and flexural joints to achieve a good miniaturization and have low-cost easy-operation features.. As compared with BAPAMAN1 this prototype has almost half size and a significant increase in stiffness and accuracy performance.
|

|
Milli-CaTraSys (Milli-Cassino Tracking System)
This video shows a tracking system named as Milli-CaTraSys (Milli-Cassino Tracking System). This system has been designed and built at LARM in Cassino. It is suitable for measuring position and orientation workspaces of robotic systems having small size. It can also apply a known wrench. This characteristics allows also to identify compliant displacements.
|

|
Milli-CaTraSys (Milli-Cassino Tracking System)
This video shows a tracking system named as Milli-CaTraSys (Milli-Cassino Tracking System). This system has been designed and built at LARM in Cassino. It is suitable for measuring position and orientation workspaces of robotic systems having small size. It can also apply a known wrench. This characteristics allows also to identify compliant displacements.
|

|
LARM Two-Fingers Microgripper
This photo shows a gripper named as LARM Two-Fingers Microgripper. This gripper has been designed and built within a collaboration between LARM in Cassino and IWF in Braunschweig. It is suitable for grasping objects having size lower than 1 millimeter. Its design is based on flexural joints and shape memory alloy actuators to achieve low-cost and easy-operation features.
|

|
LARM Two-Fingers Microgripper
This video shows a gripper named as LARM Two-Fingers Microgripper. This gripper has been designed and built within a collaboration between LARM in Cassino and IWF in Braunschweig. It is suitable for grasping objects having size lower than 1 millimeter. Its design is based on flexural joints and shape memory alloy actuators to achieve low-cost and easy-operation features.
|

|
LARM Hand III test for firm grasp
The movie produced on 3 November 2006 shows an operation with stable grasp during movement in an experience of of the prototype of LARM Hand that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino since the year 1999. The movie deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|
|
|
LARM HAND III test of firm grasp
The photo produced on 3 November 2006 shows an operation with stable grasp during movement in an experience of of the prototype of LARM Hand that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino since the year 1999. The movie deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
Simulation of LARM Hand finger movement
In this simulation one can see the operation of one finger of LARM Hand. The aim of this simulation is to verify the proper operation of the transmission mechanism.
|

|
Characterization Test of CAHYMAN prototype in June2001
The movie produced by Marco Ceccarelli in June 2001 shows an experience of operation of the prototype CAHYMAN (Cassino Hybrid Manipulator)that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino since the year 2000. The movie deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
Video of Student Practice on Grasping by LARM hand in 2008
The movie produced by Marco Ceccarelli in 2008 shows the use of a prototype of LARM Hand in an experience of student practice for the Course on Mechanics of robots that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie shows solutions for layout and programming that concern with experimental activity with teaching purposes for stable grasp by LARM Hand.
|

|
Video of Student Practice for Moving Cassino Exapod in 2008
The movie produced by Marco Ceccarelli in 2008 shows the use of aa prototype of Cassino Exapod in an experience of student practice for the Course on Mechanics of robots that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie shows solutions for layout and programming that concern with experimental activity with teaching purposes for programming the operation of the legs of Cassino Exapod..
|

|
Video of Student Practice for Light Packaging by robot in 2008
The movie produced by Marco Ceccarelli in 2008 shows the use of an industrial robot in an experience of student practice for the Course on Mechanics of robots that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie shows solutions for layout and programming that concern with experimental activity with teaching purposes for light packaging by robot.
|

|
Video of Student Practice for cream shave box assembling by robot in 2006
The movie produced by Marco Ceccarelli in 2006 shows the use of an industrial robot in an experience of student practice for the Course on Mechanics of robots that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie shows solutions for layout and programming that concern with experimental activity with teaching purposes for cream shave box assembling by robot.
|

|
Video of Student Practice for playing Chess By robot in 2008
The movie produced by Marco Ceccarelli in 2008 shows the use of an industrial robot in an experience of student practice for the Course on Mechanics of robots that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie shows solutions for layout and programming that concern with experimental activity with teaching purposes for playing chess by robot.
|

|
Video of Student Practice for coffee machine assembling by robot in 2003
The movie produced by Marco Ceccarelli in 2003 shows the use of an industrial robot in an experience of student practice for the Course on Mechanics of robots that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie shows solutions for layout and programming that concern with experimental activity with teaching purposes for assembling home coffee machine by robot.
|

|
Video of Student Practice for box covering by robot in 2006
The movie produced by Marco Ceccarelli in 2006 shows the use of an industrial robot in an experience of student practice for the Course on Mechanics of robots that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie shows solutions for layout and programming that concern with experimental activity with teaching purposes for box covering by robot.
|

|
video of test of one leg motion in BAPAMAN2 at LARM in February 2012
The movie produced by Giuseppe Carbone and Marco Ceccarelli in 2012 shows an experience for one leg motion in BAPAMAN2 that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino in the year 2012 in collaboration with IFW at TU Braunschweig. The movie deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
video of test of one leg motion limit in BAPAMAN2 at LARM in February 2012
The movie produced by Giuseppe Carbone and Marco Ceccarelli in 2012 shows an experience for one leg motion limit in BAPAMAN2 that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino in the year 2012 in collaboration with IWF at TU Brauschweig. The movie deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
Video of motion test of a screw actuated arm at LARM in July 2004.
The movie produced by Marco Ceccarelli in 2004 shows a motion test of a screw actuated arm that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino in the year 2004. The movie deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
video of leg mobility test for Cassino Hexapod in February 2005
The movie produced by Marco Ceccarelli in 2005 shows an experience of leg mobility test for Cassino Hexapod that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino in the year 2005. The movie deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
video of lateral view of leg mobility test for Cassino Hexapod in February 2005
The movie produced by Marco Ceccarelli in 2005 shows an experience of leg mobility test for Cassino Hexapod that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino in the year 2005. The movie deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
video LARM of numerical lateral simulation of rehabilitative exoskeleton finger in 2010
The movie produced at LARM in 2010 shows a video of numerical lateral simulation of rehabilitative exoskeleton finger that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie of numerical simulation deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
video LARM of numerical lateral simulation of LARM finger in 2010
The movie produced at LARM in 2010 shows a video of numerical lateral simulation of LARM finger that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie of numerical simulation deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
video LARM of numerical front simulation of rehabilitative exoskeleton finger in 2010
The movie produced at LARM in 2010 shows a video of numerical front simulation of rehabilitative exoskeleton finger that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie of numerical simulation deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
video LARM of numerical front simulation of LARM finger in 2010
The movie produced at LARM in 2010 shows a video of numerical front simulation of LARM finger that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie of numerical simulation deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
video LARM of numerical simulation of ARM hand IV in 2010
The movie produced at LARM in 2010 shows a video of numerical simulation of ARM hand IV that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie of numerical simulation deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
video LARM of numerical simulation of LARM finger in 2010
The movie produced at LARM in 2010 shows a video of numerical simulation of of LARM finger that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie of numerical simulation deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
video of grasping test of a wood cylinder by LARM hand III in December 2006
The movie shows the operation of LARM hand III during the grasping of a cylinder of wood at LARM Laboratory of Robotics and Mechatronics in Cassino.
|

|
video of grasping test of a floor ball by LARM hand III in December 2006
The movie produced in 2006 shows an experience of a grasping test of a floor ball by LARM hand III that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
video of dynamic grasping test of a floor ball by LARM hand III in November 2006
The movie produced in 2006 shows an experience of a dynamic grasping test of a floor ball by LARM hand III that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
video LARM of numerical simulation of Cassino Hexapode on a big hole in 2009
The movie produced at LARM in 2009 shows a video of numerical simulation of Cassino Hexapode on a big hole that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie of numerical simulation deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
video of motion test of one leg of Cassino Hexapode in 2008
The movie produced in 2009 shows an experience of motion test of one leg of Cassino Hexapode has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
video of drilling test of CAPAMAN2BIS on ADEPT in October 2003
The movie produced in 2003 shows an experience of drilling test of CAPAMAN2BIS on ADEPT that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino in the year 2003. The movie deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
video of mobility test of CAPAMAN2BIS in October 2003
The movie produced in 2003 shows an experience of mobility test of CAPAMAN2BIS that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino in the year 2003. The movie deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
video of mobility test of CAPAMAN2BIS with drilling tool in October 2003
The movie produced in 2003 shows an experience of mobility test of CAPAMAN2BIS with drilling tool that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino in the year 2003. The movie deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
video of numerical simulation of serial-parallel manipulator in 2001
The movie produced at LARM in 2001 shows a video of numerical simulation of a serial-parallel manipulator that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie of numerical simulation deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
video of experimental test of serial-parallel manipulator in 2001
The movie produced in 2001 shows an experience of a serial-parallel manipulator that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
video of grasping test with Teflon cylinder by LARM finger in 2003
The movie produced in 2003 shows an experience of grasping test with Teflon cylinder by LARM finger that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
video of grasping test with tennis ball by LARM finger in 2003
The movie produced in 2003 shows an experience of grasping test with tennis ball by LARM finger that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
video of grasping test with wood cylinder by LARM finger in 2003
The movie produced in 2003 shows an experience of grasping test with wood cylinder by LARM finger that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
video of motion test with tennis ball by LARM finger in 2003
The movie produced in 2003 shows an experience of motion test by LARM finger that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
second video LARM of numerical simulation of system for restoration print on a dome in 2009
The second movie produced at LARM in 2009 shows a video of numerical simulation of system for restoration print on a dome that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie of numerical simulation deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
video LARM of numerical simulation of system for restoration print in 2009
The movie produced at LARM in 2009 shows a video of numerical simulation of system for restoration print that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie of numerical simulation deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
video LARM of numerical simulation of system for restoration print on a wall in 2009
The movie produced at LARM in 2009 shows a video of numerical simulation of system for restoration print on a wall that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie of numerical simulation deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
video LARM of numerical simulation of system for restoration print on a dome in 2009
The movie produced at LARM in 2009 shows a video of numerical simulation of system for restoration print on a dome that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie of numerical simulation deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
video LARM of numerical simulation of workspace of excavator arm in 2011
The movie produced at LARM in 2011 shows a video of numerical simulation of workspace of excavator arm that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie of numerical simulation deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
video LARM of numerical simulation of manipulation of excavator arm with load in 2011
The movie produced at LARM in 2011 shows a video of numerical simulation of manipulation of excavator arm with load that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie of numerical simulation deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
video LARM of numerical simulation of excavation by excavator arm in 2011
The movie produced at LARM in 2011 shows a video of numerical simulation of excavation by excavator arm that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie of numerical simulation deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
video of CAPAMAN test of earthquake effect on grasping action of LARM hand in February 2011
The movie produced by in 2011 shows an experience of a CAPAMAN test of earthquake effect on grasping action of LARM hand I that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
video of CAPAMAN test of earthquake effect on slow horizontal motion of slider crank mechanism in February 2011
The movie produced by in 2011 shows an experience of a CAPAMAN test of earthquake effect on on slow horizontal motion of slider crank mechanism hand I that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
video of CAPAMAN test of earthquake effect on slow vertical motion of slider crank mechanism with heavy load in February 2011
The movie produced by in 2011 shows an experience of a CAPAMAN test of earthquake effect on slow vertical motion of slider crank mechanism with heavy load that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
video of CAPAMAN test of earthquake effect on speedy vertical motion of slider crank mechanism in February 2011
The movie produced by in 2011 shows an experience of a CAPAMAN test of earthquake effect on speedy vertical motion of slider crank mechanism that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
video of slow motion test of CAPAMAN mobility in February 2011
The movie produced by in 2011 shows an experience of slow motion test of CAPAMAN mobility that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
video of LARM simulation of extension motion of trunk model in 2009
The movie produced at LARM in 2009 shows a video of numerical simulation of e extension motion of trunk model that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie of numerical simulation deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
video of LARM simulation of flexion motion of trunk model in 2009
The movie produced at LARM in 2009 shows a video of numerical simulation of e flexion motion of trunk model that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie of numerical simulation deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
video of LARM simulation of rotation motion of trunk model in 2009
The movie produced at LARM in 2009 shows a video of numerical simulation of rotation motion of trunk model that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie of numerical simulation deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
SideView Video of simulation of obstacle overcoming of Cassino Rickshaw 2012.
The movie produced at LARM in 2012 shows a side view video of numerical simulation of obstacle overcoming of Cassino Rickshaw that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie of numerical simulation deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
Video of simulation of changing direction of Cassino Rickshaw 2012.
The movie produced at LARM in 2012 shows a video of numerical simulation of changing direction of Cassino Rickshaw that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie of numerical simulation deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
Video of simulation of obstacle overcoming of Cassino Rickshaw 2012
The movie produced at LARM in 2012 shows a video of numerical simulation of obstacle overcoming of Cassino Rickshaw that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie of numerical simulation deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
video of numerical simulation of leg motion of Cassino Hexapod in 2012
The movie produced in 2012 shows a video of numerical simulation of leg motion of Cassino Hexapod that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie of numerical simulation deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
video of numerical simulation of a step with tripod gait of Cassino Hexapod in 2012
The movie produced in 2012 shows a video of numerical simulation of a step with tripod gait of Cassino Hexapod that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie of numerical simulation deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
video of numerical simulation of obstacle overpassing of Cassino Hexapod in 2012
The movie produced in 2012 shows a video of numerical simulation of obstacle overpassing of Cassino Hexapod that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie of numerical simulation deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
video of robotic packaging of horticulture products at LARM in May 2007
The movie produced 2007 shows an experience for robotic packaging of horticulture products that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino in the year 2007. The movie deals with problems and solutions that concerns with experimental activity with teaching purposes but design aims.
|

|
Video of Student Practice for witing with wooden cubes during mechanics of robots classes on 2013
The movie produced in 2013 shows the use of Adept robot in an experience of student practice for the Course on Mechanics of robots that has been developed at LARM laboratory of Robotics and Mechatronics in Cassino. The movie shows solutions for writing words in italian language with wooden cubes.
|







 Pinche para ampliar
Pinche para ampliar