
|
International Workshop on Founders and Theorems of Mechanism Theory at the Technical University Dresden, Germany, October 6-8, 2004
Autore: Mauersberger, Klaus (Ed.); Kerle, Hanfried (Ed.); Ceccarelli, Marco (Ed.); Mauersberger, Klaus; Kerle, Hanfried; Moon, Francis S.; Ceccarelli, Marco; Golovin, Alexander; Koetsier, Teun; López-Cajún, Carlos S.; Plaßmeyer, Peter; Yan, Hong-Sen
Pubblicato: 2004
|
|
|
Report of Admont Workshop on History of Mechanical Engineering
Autore: Husty, Manfred (Ed.); Ceccarelli, Marco (Ed.); Ceccarelli, Marco; Husty, Manfred
Pubblicato: 2002
|
|
|
Early studies in screw theorie, in: Report of Admont Workshop on History of Mechanical Engineering
Autore: Ceccarelli, Marco
Pubblicato: 2002
|
|
|
Historical evolution of the classification of mechanics, in: Proceedings HMM 2004 : International Symposium on History of Machines and Mechanisms
Autore: Ceccarelli, Marco
Pubblicato: 2004
|
|
Ein Optimierungsverfahren für den Entwurf von Kurvenprofilen, in: 6. Kolloquium Getriebetechnik
Autore: Carbone, Giuseppe; Ceccarelli, Marco; Kerle, Hanfried
Pubblicato: 2005
|

|
Proceedings HMM 2000 : International Symposium on History of Machines and Mechanisms ; [held at the University of Cassino, Italy, from 11 - 13 May, 2000]
Autore: Ceccarelli, Marco (Ed.); Oliveira, Agamenon R. E.; Koetsier, Teun; Ceccarelli, Marco; Kerle, Hanfried; Helm, Manfred; Luck, Kurt; Roth, Bernard; Morecki, Adam; Bessonov, Arkadij Petrovič; Maunder, Leonard; Bianchi, Giovanni; Angeles, Jorge
Pubblicato: 2000
|
|
|
Designing mechanisms for two-finger microgrippers, in: Proceedings volume // 10th International Workshop on Robotics in Alpe-Adria-Danube Region, RAAD '01, Vienna, May 16 - 18, 2001, Vienna University of Technology, Austria
Autore: Carbone, Giuseppe; Ceccarelli, Marco; Kerle, Hanfried
Pubblicato: 2001
|
|
|
Design and experimental validation of a microgripper, in: Journal of robotics and mechatronics
Autore: Carbone, Giuseppe; Kerle, Hanfried; Ceccarelli, Marco; Raatz, Annika
Pubblicato: 2001
|
|
|
Facts on MMS by Lanz and Betancourt
Autore: Ceccarelli, Marco; López-Cajún, Carlos S.
Pubblicato: 2005
|
|
|
Proceedings // The Eleventh World Congress in Mechanism and Machine Science: Evolution of TMM (Theory of Machines and Mechanisms) to MMS (Machine and Mechanism Science) - An Illustration Survey
Autore: Ceccarelli, Marco
Pubblicato: 2004
|
|
|
A Historical Perspective of Robotics Toward the Future, in: Journal of robotics and mechatronics
Autore: Ceccarelli, Marco
Pubblicato: 2001
|
|
|
Italian kinematic studies in XIXth century, in: Proceedings HMM 2000 : International Symposium on History of Machines and Mechanisms
Autore: Ceccarelli, Marco
Pubblicato: 2000
|
|
|
"CINEMATICA DELLA BIELLA PIANA" BY LORENZO ALLIEVI IN 1895, in: International Workshop on Founders and Theorems of Mechanism Theory at the Technical University Dresden, Germany, October 6-8, 2004
Autore: Ceccarelli, Marco
Pubblicato: 2004
|
|
|
On the IFToMM permanent commission for history of MMS, in: Proceedings HMM 2004 : International Symposium on History of Machines and Mechanisms
Autore: Ceccarelli, Marco; Koetsier, Teun
Pubblicato: 2004
|
|
|
Proceedings HMM 2004 : International Symposium on History of Machines and Mechanisms ; [held at the University of Cassino, Italy, from 12 to 15 May 2004]
Autore: Ceccarelli, Marco (Ed.); Ceccarelli, Marco; Koetsier, Teun; Bögelsack, Gerhard; Ionescu, Theodor; Leinonen, Tatu; Moon, Francis S.; Rieger, Neville F.; Yan, Hong-Sen; Huang, Hsing-Hui; Xuan, Gao; Zhen, Lu; Chondros, Thomas G.; Borisov, Alexander; Golovin, Alexander; Ermakova, Anastasiya; Chen, I-Ming; Tay, Raymond; Xing, Shusong; Yeo, Song Huat; Berkof, Richard S.; Zaharov, Ivan; Jatsun, Sergey; [...]
Pubblicato: 2004
|
|
|
A short introduction on IFToMM officers over time, in: Proceedings HMM 2004 : International Symposium on History of Machines and Mechanisms
Autore: Ceccarelli, Marco
Pubblicato: 2004
|

|
Proceedings of Twelfth World Congress in Mechanism and Machine Science: Renaissance of Machines in Italy - from Brunelleschi to Galilei through Francesco di Giorgio and Leonardo
Autore: Ceccarelli, Marco
Pubblicato: 2007
|
|
|
Distinguished figures in mechanism and machine science
Autore: Ceccarelli, Marco (Ed.); Kerle, Hanfried
Pubblicato: 2007
|
|
|
Analysis and synthesis of Chebyshev's approximate circle-tracing four-bar mechanisms, in: Proceedings // Ninth World Congress on the Theory of Machines and Mechanisms, Politecnico di Milano, Italy, August 29/September 2, 1995, Mechanisms and transmissions
Author: Vinciguerra, Adalberto; Ceccarelli, Marco
Published: 1995
|
|
|
Burmester and Allievi: A Theory and Its Application for Mechanism Design at the End of 19th Century, in: Journal of mechanical design
Author: Koetsier, Teun; Ceccarelli, Marco
Published: 2008
|
|
|
Proceedings // 6th International Workshop on Robotics in Alpe-Adria-Danube Region ; Cassino, Italy: June 26 - 28, 1997 ; RAAD'97
Author: Ceccarelli, Marco (Ed.); Hesselbach, Jürgen; Kerle, Hanfried; Plitea, Nicolae
Published: 1997
|
|
|
RAAD 2003 : 12th International Workshop on Robotics in Alpe-Adria-Danube Region ; Cassino, Italy, May 7 - 10, 2003
Author: Ceccarelli, Marco (Ed.); Kerle, Hanfried; Hesselbach, Jürgen; Krefft, Mathias; Plitea, Nicolae
Published: 2003
|
|
|
Sbornik statej // Tretij Meždunarodnyj Seminar po Istorii Mašinovedenija : Moskva, MGTU im. N. Ė. Baumana, 17 - 19 maja, 2005 : Proceedings // Third International Workshop on History of Machines and Mechanisms : Moscow, BMSTU name after N. E. Bauman, 17 - 19 May, 2005
Author: Golovin, Alexander (Ed.); Ceccarelli, Marco (Ed.); Kerle, Hanfried
Published: 2005
|
|
|
Proceedings // International Workshop on Computational Kinematics CK2005 ; May 4 - 6, 2005: Cassino, Italy
Author: Ceccarelli, Marco (Ed.); Corves, Burkhard; Mbarek, Taoufik; Nefzi, Marwene
Published: 2005
|

|
Modeling and simulation of a waist‐trunk system with mass payloads
Author: Liang, Conghui; Nava, N.E.; Ceccarelli, Marco
Published: 2010
|

|
La ingeniería mecánica en el descubrimiento de América
Author: Prieto, J.J.; Ceccarelli, Marco; Fortes, J.C.; Cabrera, J.A.; González-Palma, R.
Published: 2010
|

|
Un procedimiento para la obtención de espacios de trabajo basado en criterios estructurales
Author: Pinto Cámara, Charles; Corral Saiz, Javier; Hernández Frías, Alfonso; Ceccarelli, Marco
Published: 2010
|

|
Clasificación de manipuladores 3R en función del espacio de trabajo
Author: Ceccarelli, Marco
Published: 2010
|

|
Sistema de estabilización del robot Pasibot
Author: Escobar, M.E.; Rubio, H.; García-Prada, J.C.; Ceccarelli, Marco
Published: 2010
|

|
Dynamics simulation of operation for a clutched arm
Author: Gu, Hao; Nava, N.E.; Ceccarelli, Marco
Published: 2010
|
|
|
A Parametric Study on Workspace Capability of CaPaMan (Cassino Parallel Manipulator), in: Anales de Ingeniería Mecánica, Anales de Ingeniería Mecánica Año 16 Vol. 1
Author: Castelli, Gianni; Ottaviano, Erika; Ceccarelli, Marco
Published: 2008
|

|
Aspectos de seguridad para robots industriales y de servicio
Author: Echávarri, J.; Carbone, Giuseppe; Muñoz, J.L.; Ceccarelli, Marco
Published: 2008
|

|
Diseño y validación experimental de un nuevo mecanismo para ruedas con capacidad de superar obstáculos
Author: González Rodríguez, A.; Ottaviano, Erika; Ceccarelli, Marco; Pintado Sanjuán, P.
Published: 2008
|

|
Optimal Design of a 6-DOF 4-4 Parallel Manipulator with Uncoupled Singularities
Author: Borràs, Júlia; Ottaviano, Erika; Ceccarelli, Marco; Thomas, Federico
Published: 2008
|

|
Optimización multi-objetivo de mecanismos. Aplicación a la robótica de servicio
Author: Castejón, C.; Carbone, Giuseppe; García-Prada, J.C.; Ceccarelli, Marco
Published: 2008
|

|
Algoritmi per l'analisi dello spazio di lavoro e per la sintesi dimensionale di manipolatori robotici
Author: Ceccarelli, Marco
Published: 1988
|

|
An Optimum Design Procedure for Two-Finger Grippers: A Case of Study
Auteur: Cuadrado Aranda, Javier; Naya M.A.; Ceccarelli, Marco; Carbone, Giuseppe
Publié: 2001
|

|
Dynamic Effects of Curvature Change in the Profile of Two Circular-Arc Cams
Auteur: Carbone, Giuseppe; Lanni, Chiara; Ceccarelli, Marco; López-Cajún, Carlos S.
Publié: 2001
|
|
A Study of Feasibility of a Laboratory Test-Bed for Brake Systems in Industrial Vehicles
Auteur: Lanni, Chiara; Ceccarelli, Marco; Figliolini G.; Ottaviano, Erika; Carbone, Giuseppe
Publié: 2001
|

|
An Optimum Design of a Mechanism for Microgrippers
Auteur: Carbone, Giuseppe; Ceccarelli, Marco; Penisi O.
Publié: 2001
|

|
A Study of Feasibility for a Low-Cost Humanoid Robot
Auteur: Carbone, Giuseppe; Ceccarelli, Marco; Takanishi Atsuo; Lim H.O.
Publié: 2001
|

|
“Application of Serial - Parallel Robot Architectures for Surgical Tasks: a Study of Feasibility
Auteur: Carbone, Giuseppe; Wolf Alon; Ceccarelli, Marco; Shoham Moshe
Publié: 2002
|

|
Design and Test of an Articulated Mechanism for a 1-Dof Anthropomorphic Finger
Auteur: Carbone, Giuseppe; Civitillo R.; Ceccarelli, Marco
Publié: 2002
|
|
Progettazione ed esperienze di laboratorio di un manipolatore parallelo per varie applicazioni
Author: Ceccarelli, Marco; Ottaviano, Erika; Carbone, Giuseppe
Published: 2002
|

|
Optimum Design of a New Humanoid Leg by Using Stiffness Analysis
Author: Carbone, Giuseppe; Lim H.O.; Takanishi Atsuo; Ceccarelli, Marco
Published: 2003
|

|
Experimental Activity for Designing a Hand with 1 Dof Anthropomorphic Fingers of Human Size
Author: Ceccarelli, Marco; Jauregui Becker J.M.; Parada Puig J.E.; Nava, N.E.; Lanni, Chiara; Carbone, Giuseppe
Published: 2003
|
|
A Study of Feasibility for a Macro-Milli Serial-Parallel Robotic Manipulator for Surgery Operated by a 3 Dofs Haptic Device
Author: Carbone, Giuseppe; Ceccarelli, Marco; Ottaviano, Erika; Checcacci D.; Frisoli A.; Avizzano C.A.; Bergamasco M.
Published: 2003
|

|
An Optimum Multi-Objective Design Procedure for Microgripping Mechanisms
Author: Carbone, Giuseppe; Jeckel M.; Havlík S.; Ceccarelli, Marco
Published: 2003
|

|
Stiffness Performances Estimation for Biped Locomotor WL-15
Author: Carbone, Giuseppe; Sugahara Y.; Lim H.O.; Takanishi Atsuo; Ceccarelli, Marco
Published: 2003
|

|
Numerical and Experimental Estimation of Stiffness Performances for the Humanoid Robot WABIAN-RV
Author: Carbone, Giuseppe; Lim H.O.; Takanishi Atsuo; Ceccarelli, Marco
Published: 2003
|
|
Stiffness Analysis for the 6-Dofs Mouth Training Parallel Robot WY-5, in: Proceedings of the ASME International Design Engineering Technical Conferences and Computers and Information in Engineering Conference - 2006, 30th Annual Mechanisms and Robotics Conference, Presentation of the lifework of Kurt Hain - pioneer of applied kinematics in Germany
Author: Carbone, Giuseppe; Takanobu H.; Ceccarelli, Marco; Takanishi Atsuo; Ohtsuki K.; Ohnishi M.; Okino A.
Published: 2003
|

|
Stiffness Analysis of the Humanoid Robot WABIAN-RIV: Modelling
Author: Carbone, Giuseppe; Lim H.O.; Takanishi Atsuo; Ceccarelli, Marco
Published: 2003
|

|
Numerical Simulation for an Optimum Design of a Humanoid Leg Through Stiffness Analysis
Author: Carbone, Giuseppe; Ceccarelli, Marco; Ogura Y.; Lim H.O.; Takanishi Atsuo
Published: 2003
|

|
Diseño y Experimentacion Para un Dedo Articulado Antropomorfo con un Grado de Libertad
Author: Ceccarelli, Marco; Jauregui Becker J.M.; Parada Puig J.E.; Nava, N.E.; Carbone, Giuseppe
Published: 2003
|
|
Validación Experimental del Modelo Dinámico del Manipuador Parallelo Capaman 2
Author: Carbone, Giuseppe; Ottaviano, Erika; Acevedo, Mario; Ceccarelli, Marco
Published: 2003
|
|
Progettazione e validazione sperimentale di camme a profilo policentrico presso il LARM di Cassino
Author: Ceccarelli, Marco; Ottaviano, Erika; Carbone, Giuseppe
Published: 2004
|

|
Numerical and Experimental Performance Analysis of Cam Profile in Two-Circular-Arc Cams
Author: Lanni, Chiara; Bianchi, Annalisa; Carbone, Giuseppe; Ceccarelli, Marco
Published: 2004
|
|
Experimental Stiffness Evaluation of a Serial-Parallel Macro-Milli Manipulator for Medical Applications
Author: Carbone, Giuseppe; Ottaviano, Erika; Ceccarelli, Marco
Published: 2004
|

|
A Procedure for Experimental Evaluation of Cartesian Stiffness Matrix of Multibody Robotic Systems
Author: Carbone, Giuseppe; Ceccarelli, Marco
Published: 2004
|

|
An Experimental Validation of a Three - Fingered Hand With 1 Dof Anthropomorphic Fingers
Author: Nava, N.E.; Carbone, Giuseppe; Ottaviano, Erika; Ceccarelli, Marco
Published: 2004
|

|
Numerical and Experimental Analysis of Cam Profiles with Circular-Arcs
Author: Ceccarelli, Marco; Lanni, Chiara; Carbone, Giuseppe
Published: 2004
|

|
Requirements for a Mechatronic Design of Test-Beds for Cams
Author: Carbone, Giuseppe; Lanni, Chiara; Ceccarelli, Marco; Incerti G.; Righettini P.
Published: 2004
|
|
A Fairly Simple Method to Identify the Curvature of a Cam Profile
Author: Ceccarelli, Marco; Carbone, Giuseppe; Lanni, Chiara; Ottaviano, Erika
Published: 2004
|

|
Hyper-performances of WY-5 (Waseda Yamanashi 5) Parallel Manipulator
Author: Carbone, Giuseppe; Takanobu H.; Ceccarelli, Marco; Takanishi Atsuo; Ohtsuki K.; Ohnishi M.; Okino A.
Published: 2004
|

|
Validacion Experimental de Manos Roboticas
Author: Nava, N.E.; Carbone, Giuseppe; Ceccarelli, Marco
Published: 2004
|

|
Design and Operation of a Low-Cost Anthropomorphic Wheeled Leg for Walking Machines
Author: Carbone, Giuseppe; Ceccarelli, Marco
Published: 2004
|
|
Un progetto per l’impiego di robot per il restauro e la conservazione di beni architettonici
Author: Cigola, Michela; Ceccarelli, Marco; Carbone, Giuseppe; Pelliccio, Assunta
Published: 2004
|
|
An Optimization Problem Approach for Designing Both Serial and Parallel Manipulators
Author: Ceccarelli, Marco; Carbone, Giuseppe; Ottaviano, Erika
Published: 2005
|
|
Optimum Path Planning of CaPaMan (Cassino Parallel Manipulator) by Using Inverse Dynamics
Author: Carbone, Giuseppe; Ceccarelli, Marco; Oliveira P.J.; Saramago S.F.P.; Carvalho, João Carlos Mendes
Published: 2005
|

|
Modelling of Cam Transmissions
Author: Lanni, Chiara; Carbone, Giuseppe; Ottaviano, Erika; Ceccarelli, Marco
Published: 2005
|
|
A Low-Cost Easy-Operation 4-Cable Driven Parallel Manipulator
Author: Ottaviano, Erika; Ceccarelli, Marco; Paone A.; Carbone, Giuseppe
Published: 2005
|

|
Experimental Tests with a Macro-Milli Robotic System
Author: Carbone, Giuseppe; Ceccarelli, Marco; Cimpoeru I.
Published: 2005
|
|
|
A synthesis method of some circle-tracing four-bar linkages
Author: Ceccarelli, Marco; Cuadrado Iglesias, J.I.; Fuenmayor Fernandez, F.
Published: 1985
|

|
On the coupler curves of Watt four-bar approximate straight-line mechanisms
Author: Ceccarelli, Marco; Nieto, J.A.; Vinciguerra, Adalberto
Published: 1985
|

|
Kinematic characteristics of some Evans mechanisms
Author: Ceccarelli, Marco; Nieto, J.A.; Vinciguerra, Adalberto; Venturi, Adriano
Published: 1985
|
|
|
The Rocker oscillations of hypocycloid mechanisms
Author: Venturi, Adriano; Vinciguerra, Adalberto; Nieto, J.A.; Ceccarelli, Marco
Published: 1985
|

|
Un procedimiento para la obtención de espacios de trabajo basado en criterios estructurales (Presentation)
, in: Compmech research group, III Workshop of the COMPMECH research group
Author: Pinto Cámara, Charles; Corral Saiz, Javier; Hernández Frías, Alfonso; Ceccarelli, Marco
Published: 2010
|

|
MMTexamsCassino08january2003
Author: Ceccarelli, Marco
Published: 2003
|

|
MMTexamsCassino08july2002
Author: Ceccarelli, Marco
Published: 2002
|

|
MMTexamsCassino09january2002
Author: Ceccarelli, Marco
Published: 2002
|

|
MMTexamsCassino11oct2002
Author: Ceccarelli, Marco
Published: 2002
|

|
MMTexamsCassino19dec2001
Author: Ceccarelli, Marco
Published: 2001
|

|
MMTexamsCassino22july2002
Author: Ceccarelli, Marco
Published: 2002
|

|
MMTexamsCassino24feb2003
Author: Ceccarelli, Marco
Published: 2003
|

|
MMTexamsCassino26nov2002
Author: Ceccarelli, Marco
Published: 2002
|

|
MMTexamsCassino27march2002
Author: Ceccarelli, Marco
Published: 2002
|

|
MMTexamsCassino24may2002_1
Author: Ceccarelli, Marco
Published: 2002
|

|
MMTexamsCassino24may2002_2
Author: Ceccarelli, Marco
Published: 2002
|

|
PracticeTMMCassino1990_1
Author: Ceccarelli, Marco
Published: 1990
|

|
PracticeTMMCassino1990_2
Author: Ceccarelli, Marco
Published: 1990
|

|
PracticeTMMCassino1990_3
Author: Ceccarelli, Marco
Published: 1990
|

|
PracticeTMMCassino1990_4
Author: Ceccarelli, Marco
Published: 1990
|

|
PracticeTMMCassino1990_5
Author: Ceccarelli, Marco
Published: 1990
|

|
PracticeTMMCassino1990_6
Author: Ceccarelli, Marco
Published: 1990
|

|
PracticeTMMCassino1990_7
Author: Ceccarelli, Marco
Published: 1990
|

|
PracticeTMMCassino1990_8
Author: Ceccarelli, Marco
Published: 1990
|

|
PracticeTMMCassino1990_9
Author: Ceccarelli, Marco
Published: 1990
|

|
PracticeTMMCassino1990_10
Author: Ceccarelli, Marco
Published: 1990
|

|
On the evolution of Mechanisms drawing, in: IFToMM Proceedings of 9th IFToMM World Congress
Author: Cigola, Michela; Ceccarelli, Marco
Published: 1995
|

|
Evoluzione della rappresentazione grafica nel progetto dei meccanismi
Author: Ceccarelli, Marco; Cigola, Michela
Published: 1997
|

|
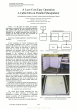
A robot application for analysis, survey and conservation of historical architectures, in: Robotics and Automation in Construction
Author: Ceccarelli, Marco
Published: 2008
|

|
Esercitazione N°1 di Meccanica Applicata alle Macchine dello studente Marco Ceccarelli
Author: Ceccarelli, Marco
Published: 1979
|

|
Esercitazione N°2 di Meccanica Applicata alle Macchine dello studente Marco Ceccarelli
Author: Ceccarelli, Marco
Published: 1979
|

|
Esercitazione N°3 di Meccanica Applicata alle Macchine dello studente Marco Ceccarelli
Author: Ceccarelli, Marco
Published: 1979
|

|
Esercitazione N°4 di Meccanica Applicata alle Macchine dello studente Marco Ceccarelli
Author: Ceccarelli, Marco
Published: 1980
|

|
Esercitazione N°5 di Meccanica Applicata alle Macchine dello studente Marco Ceccarelli
Author: Ceccarelli, Marco
Published: 1980
|

|
Esercitazione N°6 di Meccanica Applicata alle Macchine dello studente Marco Ceccarelli
Author: Ceccarelli, Marco
Published: 1980
|

|
Esercitazione N°7 di Meccanica Applicata alle Macchine dello studente Marco Ceccarelli
Author: Ceccarelli, Marco
Published: 1980
|

|
Esercitazione N°8 di Meccanica Applicata alle Macchine dello studente Marco Ceccarelli
Author: Ceccarelli, Marco
Published: 1980
|

|
Esercitazione N°9 di Meccanica Applicata alle Macchine dello studente Marco Ceccarelli
Author: Ceccarelli, Marco
Published: 1980
|

|
Esercitazione N°10 di Meccanica Applicata alle Macchine dello studente Marco Ceccarelli
Author: Ceccarelli, Marco
Published: 1980
|

|
Esercitazione N°11 di Meccanica Applicata alle Macchine dello studente Marco Ceccarelli
Author: Ceccarelli, Marco
Published: 1980
|

|
Esercitazione N°12 di Meccanica Applicata alle Macchine dello studente Marco Ceccarelli
Author: Ceccarelli, Marco
Published: 1980
|

|
Esercitazione N°13 di Meccanica Applicata alle Macchine dello studente Marco Ceccarelli
Author: Ceccarelli, Marco
Published: 1980
|

|
Esercitazione N°14 di Meccanica Applicata alle Macchine dello studente Marco Ceccarelli
Author: Ceccarelli, Marco
Published: 1980
|

|
Esercitazione N°15 di Meccanica Applicata alle Macchine dello studente Marco Ceccarelli
Author: Ceccarelli, Marco
Published: 1980
|

|
Esercitazione N°16 di Meccanica Applicata alle Macchine dello studente Marco Ceccarelli
Author: Ceccarelli, Marco
Published: 1980
|

|
Esercitazione N°17 di Meccanica Applicata alle Macchine dello studente Marco Ceccarelli
Author: Ceccarelli, Marco
Published: 1980
|

|
Esercitazione N°18 di Meccanica Applicata alle Macchine dello studente Marco Ceccarelli
Author: Ceccarelli, Marco
Published: 1980
|

|
Esercitazione N°19 di Meccanica Applicata alle Macchine dello studente Marco Ceccarelli
Author: Ceccarelli, Marco
Published: 1980
|

|
Esercitazione N°20 di Meccanica Applicata alle Macchine dello studente Marco Ceccarelli
Author: Ceccarelli, Marco
Published: 1980
|

|
Esercitazione N°21 di Meccanica Applicata alle Macchine dello studente Marco Ceccarelli
Author: Ceccarelli, Marco
Published: 1980
|

|
Esercitazione N°22 di Meccanica Applicata alle Macchine dello studente Marco Ceccarelli
Author: Ceccarelli, Marco
Published: 1980
|

|
Esercitazione N°23 di Meccanica Applicata alle Macchine dello studente Marco Ceccarelli
Author: Ceccarelli, Marco
Published: 1980
|

|
Esercitazione N°24 di Meccanica Applicata alle Macchine dello studente Marco Ceccarelli
Author: Ceccarelli, Marco
Published: 1980
|

|
Esercitazione N°25 di Meccanica Applicata alle Macchine dello studente Marco Ceccarelli
Author: Ceccarelli, Marco
Published: 1980
|

|
Proceedings of Twelfth World Congress in Mechanism and Machine Science: A comparison of indices for stiffness performance evaluation.
Author: Carbone, Giuseppe; Ceccarelli, Marco
Published: 2007
|

|
Proceedings of Twelfth World Congress in Mechanism and Machine Science: Design Evolution of Low-Cost Humanoid Robot CALUMA.
Author: Rodriguez, N. E. Nava; Carbone, Giuseppe; Ceccarelli, Marco
Published: 2007
|

|
Proceedings of Twelfth World Congress in Mechanism and Machine Science: A multi-objective optimization for designing service robots.
Author: Castejón, C.; Carbone, Giuseppe; García-Prada, J.C.; Ceccarelli, Marco
Published: 2007
|

|
Proceedings of Twelfth World Congress in Mechanism and Machine Science: Certified Pose Determination under Uncertainties.
Author: Grandon, Carlos; Daney, David; Papegay, Yves; Tavolieri, C.; Ottaviano, Erika; Ceccarelli, Marco
Published: 2007
|

|
Design and Simulation of a Binary Actuated Parallel Micro-Manipulator, in: Final program // Thirteenth World Congress in Mechanism and Machine Science, Robotics and Mechatronics
Author: Burisch, Arne; Carbone, Giuseppe; Ceccarelli, Marco; Gu, Hao; Liang, Conghui; Raatz, Annika
Published: 2011
|

|
Historical Remarks on Past Model Collections of Machines and Mechanisms in Europe, in: Final program // Thirteenth World Congress in Mechanism and Machine Science, History of MMS
Author: Ceccarelli, Marco; Kerle, Hanfried; Mauersberger, Klaus
Published: 2011
|

|
Mechanism designs of cultural heritage, in: Final program // Thirteenth World Congress in Mechanism and Machine Science, History of MMS
Author: Ceccarelli, Marco
Published: 2011
|

|
Ivan Ivanovich Artobolevski as one of the Founders of IFToMM, in: Final program // Thirteenth World Congress in Mechanism and Machine Science, History of MMS
Author: Egorova, Olga; Ceccarelli, Marco
Published: 2011
|

|
Experimental result on the grasping of a two-finger gripper, in: Anales de Ingeniería Mecánica, Anales de Ingeniería Mecánica Año 13 Vol. 2
Author: Ceccarelli, Marco; Figliolini, Giorgio; Ottaviano, Erika; Herrera Tobarvela, David; Mata, Antonio Simón
Published: 2000
|

|
An Optimization problem for optimum design of capaman (Cassino Parallel Manipulator) with prescribed workspace, in: Anales de Ingeniería Mecánica, Anales de Ingeniería Mecánica Año 13 Vol. 4
Author: Ottaviano, Erika; Ceccarelli, Marco
Published: 2000
|

|
Analytical Design of Circle-Tracing Four-Bar Linkages
Author: Ceccarelli, Marco
Published: 1987
|

|
On the Workspace of 3R Robot Arms
Author: Ceccarelli, Marco
Published: 1989
|

|
Grasping Force Capability of Gripper Mechanisms
Author: Ceccarelli, Marco
Published: 1991
|

|
A Synthesis Algorithm of Three-Revolute Manipulators by means of the Workspace Contour Algebraic Formulation
Author: Ceccarelli, Marco
Published: 1992
|

|
Optimal Design and Location of Manipulators
Author: Ceccarelli, Marco
Published: 1993
|

|
A Boundary Formulation for General Hyper-Rings in 5R Manipulators
Author: Ceccarelli, Marco
Published: 1993
|

|
Design Problems for Industrial Robot Two-Finger Grippers
Author: Ceccarelli, Marco
Published: 1994
|

|
On the Evolution of Mechanisms Drawing, in: IFToMM Proceedings of 9th IFToMM World Congress
Author: Cigola, Michela; Ceccarelli, Marco
Published: 1995
|

|
Screw Axis Defined by Giulio Mozzi in 1763, in: IFToMM Proceedings of 9th IFToMM World Congress
Author: Ceccarelli, Marco
Published: 1995
|

|
A Study of Feasibility for a New Wrist
Author: Ceccarelli, Marco
Published: 1996
|

|
A Workspace Analysis for RRP Manipulators
Author: Ceccarelli, Marco
Published: 1996
|

|
Diseño Optimo de Brazos Manipuladores respecto al Espacio de Trabajo
Author: Ceccarelli, Marco
Published: 1997
|

|
An Optimum Design for Gripping Mechanisms
Author: Ceccarelli, Marco
Published: 1997
|

|
Manipulation Analysis and Programming for Optimum use of Industrial Robots
Author: Ceccarelli, Marco
Published: 1998
|

|
A Stiffness Analysis for CaPaMan (Cassino Parallel Manipulator)
Author: Ceccarelli, Marco
Published: 1998
|

|
Cinematica della Biella Piana by Lorenzo Allievi in 1895
Author: Ceccarelli, Marco
Published: 1999
|

|
Preliminary Studies to Screw Theory in XVIIth Century
Author: Ceccarelli, Marco
Published: 2000
|

|
An Overview of History of Robotics with an Eye to the Future
Author: Ceccarelli, Marco
Published: 2000
|

|
From TMM to MMS: a Vision of IFToMM
Author: Ceccarelli, Marco
Published: 2001
|

|
An optimum design of parallel manipulators formulation and experimental validation
Author: Ceccarelli, Marco
Published: 2002
|

|
An Illustration Overview of Mechanism Classifications over the Time
Author: Ceccarelli, Marco
Published: 2003
|

|
Early TMM in Le Mecaniche by Galileo Galilei in 1593
Author: Ceccarelli, Marco
Published: 2004
|

|
Kinematic Design of Manipulators: A Survey and Future Challenges
Author: Ceccarelli, Marco
Published: 2005
|

|
IFToMM activity and its visibility
Author: Ceccarelli, Marco
Published: 2004
|

|
Work and influence of Francesco Masi in Italy at the end of 19-th century
Author: Ceccarelli, Marco
Published: 2005
|

|
A Fairly Simple Method to Identify the Curvature of a Cam Profile
Author: Ceccarelli, Marco; Lanni, Chiara; Carbone, Giuseppe
Published: 2005
|

|
Problems and Procedures for Kinematic Design of Manipulators
Author: Ceccarelli, Marco
Published: 2005
|

|
Greek Mechanics of Machinery in the Early Works on Modern TMM
Author: Ceccarelli, Marco
Published: 2006
|
|
Documentation and Conservation of Built Heritage by using Robots
Author: Cigola, Michela; Ceccarelli, Marco
Published: 2006
|

|
El Renacimiento de las maquinas: primer desarrollo de la ingenieria mecanica moderna
Author: Ceccarelli, Marco
Published: 2006
|

|
Lorenzo Allievi e la cinematica dei meccanismi in Italia nel secolo 19
Author: Ceccarelli, Marco; Koetsier, Teun
Published: 2006
|

|
Rappresentazione ed analisi di macchine e meccanismi nella trattatistica tecnica dal XV al XVII secolo
Author: Ceccarelli, Marco; Cigola, Michela
Published: 2006
|

|
Mechanism Design: what is new in what is old and what is old in what is new
Author: Ceccarelli, Marco
Published: 2006
|

|
Kinematic Design and Experimental Validation of Manipulators
Author: Ceccarelli, Marco
Published: 2006
|

|
Una visión critica de la aplicación del proceso de europeización de la enseñanza académica en ingeniería mecánica (industrial)
Author: Ceccarelli, Marco
Published: 2007
|

|
MECANISMOS Y MAQUINAS DEL PASADO PARA UNA INGENIERÍA MECÁNICA MODERNA
Author: Ceccarelli, Marco
Published: 2007
|

|
A Note on Roman Engineers and their Machines
Author: Ceccarelli, Marco
Published: 2007
|

|
Alcune Tappe verso l’Automazione
Author: Rossi, Cesare; Cigola, Michela; Ceccarelli, Marco
Published: 2008
|

|
Sviluppo di Automi in Italia
Author: Ceccarelli, Marco; Cigola, Michela; Rossi, Cesare
Published: 2008
|

|
Maquinas Y Papeleras En La Historia Del Bajo Lazio En El Siglo 19
Author: Cigola, Michela; Ceccarelli, Marco
Published: 2008
|

|
Hain K.:An Actor of the Second Golden Age for Mechanism Science
Author: Ceccarelli, Marco
Published: 2008
|

|
A Numerical Characterization for the Operation of an Underactuated Finger Mechanism
Author: Wu, L.; Ceccarelli, Marco
Published: 2008
|

|
Kinematic Design of Manipulators
Author: Ceccarelli, Marco
Published: 2008
|

|
Design of LARM Hand: Problems and Solutions
Author: Carbone, Giuseppe; Ceccarelli, Marco
Published: 2008
|

|
Influencia de la Obra De Gaspard Monge en el Desarrollo de la Ingenieria Mecanica Italiana en el Siglo 19
Author: Ceccarelli, Marco
Published: 2009
|

|
A Study of Feasibility for a Leg Design with Parallel Mechanism Architecture
Author: Ceccarelli, Marco; Carbone, Giuseppe
Published: 2009
|

|
LA MECANICA DE ARQUIMEDES EN EL DESARROLLO DE LA MAQUINAS
Author: Ceccarelli, Marco
Published: 2009
|

|
New challenging applications for service robots: problems and experiences
Author: Ceccarelli, Marco
Published: 2009
|

|
Role of IFToMM in MMS Developments
Author: Ceccarelli, Marco
Published: 2010
|

|
A perspective of Mechanism and Machine Science: from the past to the future
Author: Ceccarelli, Marco
Published: 2010
|

|
DESIGN AND OPERATION OF FINGERED HANDS AND TWO-FINGER GRIPPERS FOR SPACE APPLICATIONS AS FROM EXPERINCES AT LARM
Author: Ceccarelli, Marco; Carbone, Giuseppe
Published: 2010
|

|
Problems and experiences in using parallel manipulators for medical applications
Author: Ceccarelli, Marco
Published: 2010
|

|
An experimental evaluation of earthquake effects on mechanism operation
Author: Selvi, Ozgun; Ceccarelli, Marco
Published: 2010
|

|
Clasificación de manipuladores 3R en función del espacio de Trabajo
Author: Ceccarelli, Marco
Published: 2010
|

|
Design and experimental validation of mechanisms for novel applications
Author: Ceccarelli, Marco
Published: 2011
|

|
TeachingNote1990
Author: Ceccarelli, Marco
Published: 1990
|

|
Catrasys (cassino tracking system): un sistema de medida de la posición y orientación de objetos móviles mediante hilos extensibles, in: Anales de Ingeniería Mecánica, Anales de Ingeniería Mecánica Año 15 Vol. 4
Author: Ceccarelli, Marco; Thomas, Federico; Ottaviano, Erika
Published: 2004
|
|
ROBOTICA E AUTOMAZIONE del Gruppo di Meccanica Applicata alle Macchine di Cassino, in: Atti del IV Seminario di Meccanica Applicata alle Macchine
Author: Figliolini, Giorgio; Ceccarelli, Marco; Cavacece, Massimo; Papa, Luigi
Published: 1996
|

|
Applicazioni di robot nello studio e nel rilevamento di pavimenti storici
Author: Cigola, Michela; Ceccarelli, Marco; Pelliccio, Assunta; Carbone, Giuseppe; Ottaviano, Erika
Published: 2003
|

|
Gaspard Monge e la sua influenza in Italia tra geometria descrittiva e teoria dei meccanismi
Author: Cigola, Michela; Ceccarelli, Marco
Published: 2007
|

|
Contiguità e commistione tra geometria descrittiva e teoria dei meccanismi Nell’ingegneria italiana del XIX secolo
Author: Cigola, Michela; Ceccarelli, Marco
Published: 2009
|
|
|
Estimate of torsional stiffnesses and shear moduli of human cervical spine discs, in: Anales de Ingeniería Mecánica, Anales de Ingeniería Mecánica Año 5 Vol. 2
Author: Nieto Nieto, Justo; Ceccarelli, Marco; Vinciguerra, Adalberto; Brach, E.
Published: 1987
|

|
Kinematic evaluation of a robotic gripper, in: Anales de Ingeniería Mecánica, Anales de Ingeniería Mecánica Año 6 Vol. 1
Author: Ceccarelli, Marco; Nieto Nieto, Justo
Published: 1988
|

|
A fatigue approach for material selection and dimensional design of robots, in: Anales de Ingeniería Mecánica, Anales de Ingeniería Mecánica Año 10 Vol. 1
Author: Ceccarelli, Marco; Iacovello, F.
Published: 1994
|

|
An algorithm for forward and reverse displacement analysis of a turin platform, in: Anales de Ingeniería Mecánica, Anales de Ingeniería Mecánica Año 10 Vol. 1
Author: Ceccarelli, Marco; Cuadrado Iglesias, J.I.; Mata, V.; Sorli, Massimo
Published: 1994
|

|
A Numerical Evaluation of the Stiffness of CaHyMan (Cassino Hybrid Manipulator)
Author: Teolis M.; Ceccarelli, Marco; Carbone, Giuseppe
Published: 2001
|

|
MMTexamsCassino03April2006
Author: Ceccarelli, Marco
Published: 2006
|

|
MMTexamsCassino03July2006
Author: Ceccarelli, Marco
Published: 2006
|

|
MMTexamsCassino03Oct2005
Author: Ceccarelli, Marco
Published: 2005
|

|
MMTexamsCassino03Sept2002
Author: Ceccarelli, Marco
Published: 2002
|

|
MMTexamsCassino04July2006
Author: Ceccarelli, Marco
Published: 2006
|

|
MMTexamsCassino04Sept2002
Author: Ceccarelli, Marco
Published: 2002
|

|
MMTexamsCassino07July2003
Author: Ceccarelli, Marco
Published: 2003
|

|
MMTexamsCassino08Sept2003
Author: Ceccarelli, Marco
Published: 2003
|

|
MMTexamsCassino09January2004
Author: Ceccarelli, Marco
Published: 2004
|

|
MMTexamsCassino09January2006
Author: Ceccarelli, Marco
Published: 2006
|

|
MMTexamsCassino10July2006
Author: Ceccarelli, Marco
Published: 2006
|

|
MMTexamsCassino11Dec2002
Author: Ceccarelli, Marco
Published: 2002
|

|
MMTexamsCassino01April2003
Author: Ceccarelli, Marco
Published: 2003
|
|
APPLICATION OF ROBOTS FOR INSPECTION AND RESTORATION OF HISTORICAL SITES
Author: Ceccarelli, Marco; Pelliccio, Assunta; Carbone, Giuseppe; Ottaviano, Erika
Published: 2003
|

|
A Study of Feasibility of Using Robots in Architecture Analysis and Survey of a Historical Pavement
Author: Ceccarelli, Marco; Ottaviano, Erika; Gallozzi A.; Carbone, Giuseppe; Pelliccio, Assunta
Published: 2002
|

|
Trends in the drawing of mechanisms since the early Middle Ages
Author: Ceccarelli, Marco
Published: 2001
|

|
MMTexamsCassino11July2005
Author: Ceccarelli, Marco
Published: 2005
|

|
MMTexamsCassino12July2005
Author: Ceccarelli, Marco
Published: 2005
|

|
MMTexamsCassino13May2005
Author: Ceccarelli, Marco
Published: 2005
|

|
MMTexamsCassino14April2003
Author: Ceccarelli, Marco
Published: 2003
|

|
MMTexamsCassino15Dec2003
Author: Ceccarelli, Marco
Published: 2003
|

|
MMTexamsCassino16March2006
Author: Ceccarelli, Marco
Published: 2006
|

|
MMTexamsCassino18April2005
Author: Ceccarelli, Marco
Published: 2005
|

|
MMTexamsCassino18July2005
Author: Ceccarelli, Marco
Published: 2005
|

|
MMTexamsCassino18Sept2006
Author: Ceccarelli, Marco
Published: 2006
|

|
MMTexamsCassino19Dec2006
Author: Ceccarelli, Marco
Published: 2006
|

|
MMTexamsCassino19Feb2006
Author: Ceccarelli, Marco
Published: 2006
|

|
MMTexamsCassino20July2004
Author: Ceccarelli, Marco
Published: 2004
|

|
MMTexamsCassino20June2005
Author: Ceccarelli, Marco
Published: 2005
|

|
MMTexamsCassino20Oct2003
Author: Ceccarelli, Marco
Published: 2003
|

|
MMTexamsCassino20Sept2004
Author: Ceccarelli, Marco
Published: 2004
|

|
MMTexamsCassino21July2003
Author: Ceccarelli, Marco
Published: 2003
|

|
MMTexamsCassino22May2006
Author: Ceccarelli, Marco
Published: 2006
|

|
MMTexamsCassino23May2005
Author: Ceccarelli, Marco
Published: 2005
|

|
MMTexamsCassino24April2006
Author: Ceccarelli, Marco
Published: 2006
|

|
MMTexamsCassino24March2005
Author: Ceccarelli, Marco
Published: 2005
|

|
MMTexamsCassino24Nov2003
Author: Ceccarelli, Marco
Published: 2003
|

|
MMTexamsCassino24Nov2004
Author: Ceccarelli, Marco
Published: 2004
|

|
MMTexamsCassino26May2003
Author: Ceccarelli, Marco
Published: 2003
|

|
MMTexamsCassino27March2006
Author: Ceccarelli, Marco
Published: 2006
|

|
MMTexamsCassino27Nov2006
Author: Ceccarelli, Marco
Published: 2006
|

|
MMTexamsCassino30March2005
Author: Ceccarelli, Marco
Published: 2005
|
|
|
North Pointing stability in gyrocompasses., in: Anales de Ingeniería Mecánica, Anales de Ingeniería Mecánica Año 8 Vol. 1
Author: Ceccarelli, Marco; Cuadrado Iglesias, J.I.
Published: 1990
|

|
Opere di Ruggiero Giuseppe Boscovich
Author: Ceccarelli, Marco
Published: 2013
|

|
On the computer simulation path of a spin-axis point in gyro-compasses
Author: Ceccarelli, Marco; Venturi, Adriano; Vinciguerra, Adalberto
Published: 1984
|

|
Fiabilidad de una nueva plataforma romana | Feasibility of a new roman platform
Author: Ceccarelli, Marco; Vinciguerra, Adalberto
Published: 1995
|
|
|
Simplifying dynamic equation for planar mechanical systems., in: Anales de Ingeniería Mecánica Año 12 Vol. 1
Author: Figliolini G.; Ceccarelli, Marco
Published: 1998
|

|
Workspace Topologies of Industrial 3R Manipulators, in: International Journal of Advanced Robotic Systems
Author: Ottaviano, Erika; Ceccarelli, Marco; Husty, Manfred
Published: 2007
|

|
Design and Simulation of Legged Walking Robots in MATLAB® Environment : Progettazione e simulazione di sistemi robotici a gambe in ambiente Matlab, in: MATLAB for Engineers - Applications in Control, Electrical Engineering, IT and Robotics
Author: Liang, Conghui; Ceccarelli, Marco; Carbone, Giuseppe
Published: 2011
|

|
Cover Book Ceccarelli - Cajun
Author: Ceccarelli, Marco; López-Cajún, Carlos S.
Published: 2008
|

|
List of main works by Lorenzo Allievi
Author: Ceccarelli, Marco
Published: 2013
|
|
|
A mechanical design of an articulated finger mechanism., in: Anales de Ingeniería Mecánica, Anales de Ingeniería Mecánica Año 11 Vol.3
Author: Figliolini G.; Ceccarelli, Marco
Published: 1997
|

|
Numerical and Experimental Analysis of Radial Cams with circular arc profiles
Author: Lanni, Chiara; Carbone, Giuseppe; Ottaviano, Erika; Ceccarelli, Marco
Published: 2005
|

|
A Survey on Roman Engineers and Their Machines
Author: Ceccarelli, Marco; De Paolis, Paolo
Published: 2008
|

|
Quintino Sella - Biography
Author: Ceccarelli, Marco
Published: 2013
|

|
2012LARM internal report on CaTraSys testing
Author: Ceccarelli, Marco
Published: 2012
|

|
internalLARMreportonRingWorkspaceTopology inJuly2010
Author: Ceccarelli, Marco
Published: 2010
|

|
rapporto interno LARM The earthquake effects on mechanism in versione del 2003
Author: Ceccarelli, Marco
Published: 2003
|

|
Report of activity LARM for a robotization of a spray deposition in July 2007
Author: Ceccarelli, Marco
Published: 2007
|

|
Relazione di attività LARM su impacchettamento robotizzato di profitti ortofrutticoli in Maggio 2007
Author: Ceccarelli, Marco
Published: 2007
|

|
PubblicationsMarcoCeccarelli
Author: Ceccarelli, Marco
Published: 2013
|

|
Curriculum vitae of Marco Ceccarelli
Author: Ceccarelli, Marco
Published: 2013
|

|
Paper Syrom93 - Conference paper on Dynamics of 3R manipulators
Author: Ceccarelli, Marco
Published: 1993
|

|
Del Monte Bibliography
Author: Ceccarelli, Marco
Published: 2013
|

|
Dennison Bibliography
Author: Ceccarelli, Marco
Published: 2013
|

|
DKW Bibliography
Author: Ceccarelli, Marco
Published: 2013
|

|
Domenico Fontana Bibliography
Author: Ceccarelli, Marco
Published: 2013
|

|
Giovanni Fontana Bibliography
Author: Ceccarelli, Marco
Published: 2013
|

|
Dante Giacosa Bibliography
Author: Ceccarelli, Marco
Published: 2013
|

|
Gilera Bibliography
Author: Ceccarelli, Marco
Published: 2013
|

|
Girard-Perregaux Bibliography
Author: Ceccarelli, Marco
Published: 2013
|

|
Walter Gropius bibliography
Author: Ceccarelli, Marco
Published: 2013
|

|
Athanasius Kircher bibliography
Author: Ceccarelli, Marco
Published: 2013
|

|
Francesco Maurolico bibliography
Author: Ceccarelli, Marco
Published: 2013
|

|
Muzio Oddi bibliography
Author: Ceccarelli, Marco
Published: 2013
|

|
Giovanni Poleni bibliography
Author: Ceccarelli, Marco
Published: 2013
|

|
Rolex bibliography
Author: Ceccarelli, Marco
Published: 2013
|

|
Antonio da Sangallo il Giovane bibliography
Author: Ceccarelli, Marco
Published: 2013
|

|
Piero Taruffi bibliography
Author: Ceccarelli, Marco
Published: 2013
|

|
Robot Manipulators : Manipolatori robotici
Author: Ceccarelli, Marco
Published: 2008
|

|
Proceedings of the 14th IFToMM World Congress, Biomechanical Engineering: Design and Analysis of an Exoskeleton for People with Motor Disabilities
Author: Geonea, Ionut Daniel; Ceccarelli, Marco; Carbone, Giuseppe
Published: 2015
|

|
Proceedings of the 14th IFToMM World Congress, Robotics and Mechatronics: Force Distribution Based on Loading Capacity of a Hexapod Robot with Insect-Mammal Mixed Tripod Gait
Author: Peng, Saijin; Ding, Xilun; Ceccarelli, Marco; Yang, F.
Published: 2015
|
|
Proceedings of the 14th IFToMM World Congress, Robotics and Mechatronics: Stiffness Analysis for a Tripod Leg Mechanism
Author: Wang, Mingfeng; Carbone, Giuseppe; Ceccarelli, Marco
Published: 2015
|
|
Proceedings of the 14th IFToMM World Congress, Robotics and Mechatronics: Design and Validation of a PKM Structure for a Humanoid Torso
Author: Cafolla, Daniele; Ceccarelli, Marco
Published: 2015
|
|
Proceedings of the 14th IFToMM World Congress, Robotics and Mechatronics: A Pedal-Actuated Wheelchair with a Leg Exoskeleton
Author: Huang, Gao; Ceccarelli, Marco; Zhang, Weimin; Liu, H. X.; Tian, Ye; She, H. T.; Fukuda, Toshio; Huang, Qiang
Published: 2015
|

|
Proceedings of the 14th IFToMM World Congress, Gearing and Transmissions: Effects of Boundary Conditions on Vibration Characteristics of Planetary Ring Gear
Author: Zhang, Jun; Bian, Shiyuan; Liu, Xian-Zeng; Ceccarelli, Marco
Published: 2015
|
|
Proceedings of the 14th IFToMM World Congress, History of MMS: Figures and Achievements in MMS as Landmarks in History of MMS for Inspiration of IFToMM Activity
Author: Ceccarelli, Marco
Published: 2015
|
|
Proceedings of the 14th IFToMM World Congress, Design Methodology: Configuration Change Analysis and Design of Metamorphic Mechanisms with Isomeric Structure
Author: Li, Duanling; Wang, Zhongbao; Ceccarelli, Marco
Published: 2015
|
|
Proceedings of the 14th IFToMM World Congress, History of MMS: Kinematic and Dynamic Analysis of Old Mechanism by Modern Means
Author: Torres-Moreno, J.; Giménez-Fernández, A.; Carbone, Giuseppe; Ceccarelli, Marco
Published: 2015
|







 Premi per ingrandire
Premi per ingrandire

































































































































































